

-
 Covers the entire application process for aviation/air defense and anti-missile weapon systems, from scientific research and design finalization to testing, evaluation, training, and exercises. MORE
Covers the entire application process for aviation/air defense and anti-missile weapon systems, from scientific research and design finalization to testing, evaluation, training, and exercises. MORE -
The company has a solid foundation of comprehensive personnel, rich experience, and technical advantages in the field of unmanned aerial vehicles and artificial intelligence applications. It actively cooperates with many domestic and foreign units to carry out joint research, forming a unique unmanned aerial vehicle research direction of "Jinpengda" with strong sustainability. MORE
-
The company upholds the business philosophy of "integrity, dedication, pragmatism, and excellence", adheres to the mission of "innovation, transcendence, and leadership", creates a "renowned brand of unmanned aerial vehicles", and wholeheartedly provides users with comprehensive and full-cycle high-quality, efficient, and reliable services. MORE
-
GFA AVIATION TECHNOLOGY BEIJING Co..Ltd is a dual high-tech enterprise integrating R&D, production, and service of unmanned aerial vehicles and aero-engines. Established in 2012, with a registered capital of 67.35 million yuan, it is located in Zhongguancun Science Park - Fangshan Park, and has complete R&D and production facilities. MORE



KFS-4 integrated control and navigation unit
Technical Parameters
| Power Supply | +20V~﹢32V DC |
| Communication Interface | 6-channel RS-422 |
| 2-channel CAN | |
| 1-channel USB | |
| Discrete Input | 8 channels |
| Discrete Output | 50 channels |
| PWM Output | 8 channels |
| Data Storage Capacity | 8GB |
| Three-axis Acceleration | ﹣20g~﹢20g |
| Three-axis Angular Rate Range | ﹣450°/s~﹢450°/s |
| Zero Drift | ≤10°/h |
| Horizontal Positioning Accuracy | ≤1.5m |
| GNSS Receiver | 2 channels |
| Operating Temperature | ﹣55℃~﹢60℃(-40℃~+60℃ startup) |
| Storage Temperature | ﹣30℃~﹢60℃ |
| Shock | 15g (three axes) |
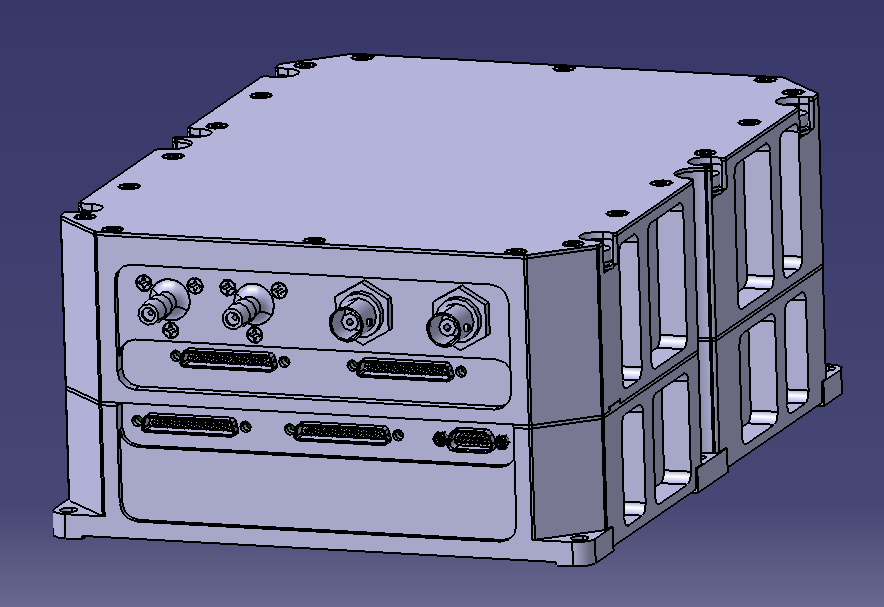
The KFS-4 integrated control and navigation unit uses a high-speed, high-performance ARM chip as its main control chip, and builds a digital control system with MEMS inertial measurement units, GNSS receivers, atmospheric pressure sensors, etc. Based on data from sensor measurements, it performs integrated navigation calculations, flight path prediction, and command control, calculating and controlling the rudder's output in real time to achieve flight control and navigation functions. In addition, the KFS-4 integrated control and navigation unit is designed with abundant communication interface resources such as RS422, CAN, and USB for easy future expansion and upgrades.
The appearance of the KFS-4 integrated control and navigation unit is shown in the figure below:
Other Content
KFS-3B integrated control and navigation unit
The KFS-3B flight control and navigation unit consists of a MEMS inertial measurement unit, a GNSS receiver, an atmospheric pressure sensor, and a main controller based on a high-performance ARM. The flight control and navigation unit uses sensor measurements to determine the flight path and commands, performing real-time calculations and controlling the aircraft to achieve flight control and navigation. It uses a MEMS inertial measurement unit to measure and collect the carrier's raw inertial navigation data, including rate gyro data and accelerometer data. A GNSS receiver obtains GNSS position and velocity data; dual GNSS is used to improve performance and reliability. An atmospheric pressure sensor receives total and static pressure from the airspeed tube to calculate parameters such as true airspeed, indicated airspeed, and flight altitude. Inertial navigation and GNSS combined navigation calculations are performed, and then the aircraft's control surfaces are controlled to achieve climbing, descending, and turning.
The KCD-3 servo motor consists of a maxon imported motor, a low-backlash harmonic reducer, and a precision non-linear wound angle sensor.
Image Display

Please scan the official account QR code
Learn more about the company

Perhaps you would also like to know

Sales Phone
Sales Email:market@bjgfa.com
Switchboard:+86 010-80326991
Email:bjgfa@bjgfa.com
Address: No. 6 Qihang Street, Douhian Town, Fangshan District, Beijing